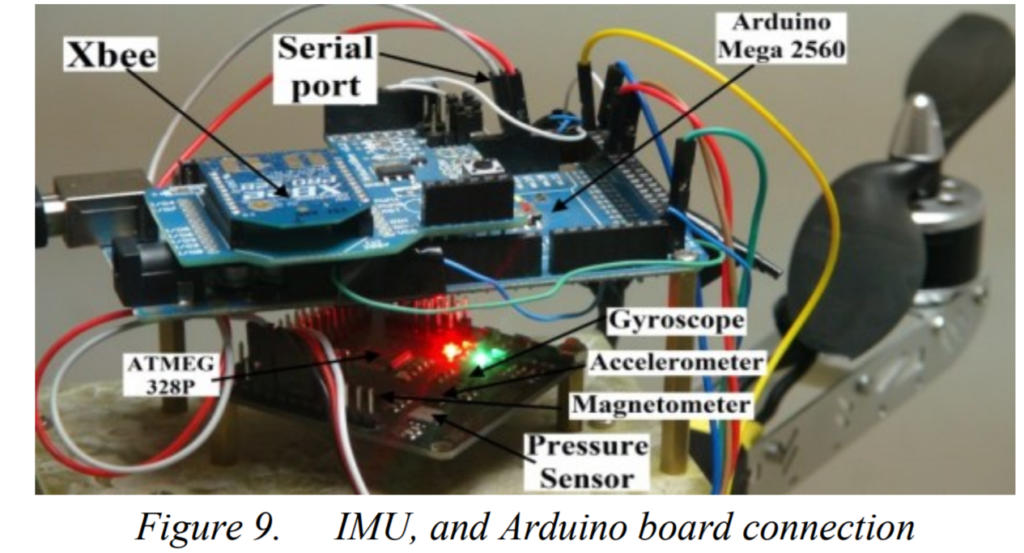
主要思想就是如何实现,架子用solidworks ,PWM ( Width Modulation )脉冲宽度调制是一种模拟控制方式,根据相应载荷的变化来调制晶体管基极或MOS管栅极的偏置,来实现晶体管或MOS管导通时间的改变,从而实现开关稳压电源输出的改变。 (摘自百度百科)用于算法实现用IMU( inertial measurement unit ) 惯性测量单元 ,它由三个单轴的加速度计和三个单轴的陀螺仪组成,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺仪检测载体相对于导航坐标系的角速度信号,对这些信号进行处理之后,便可解算出物体的姿态,这点弥补了GPS定位的不足。 算法用于实现机体稳定,主要思想是负反馈。
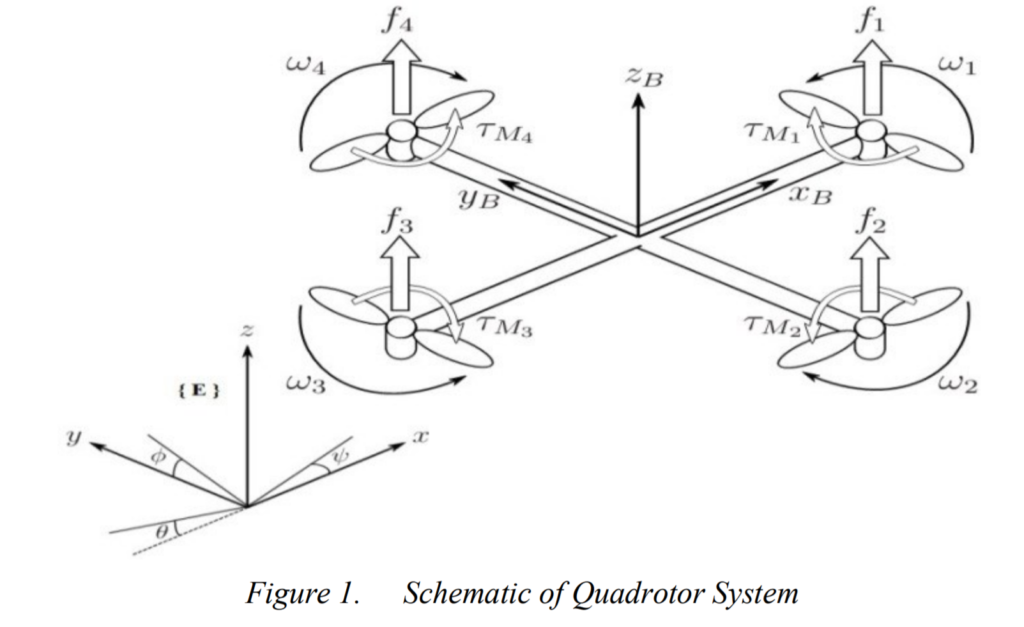
Quadrotor (四旋翼)系统的动力轴
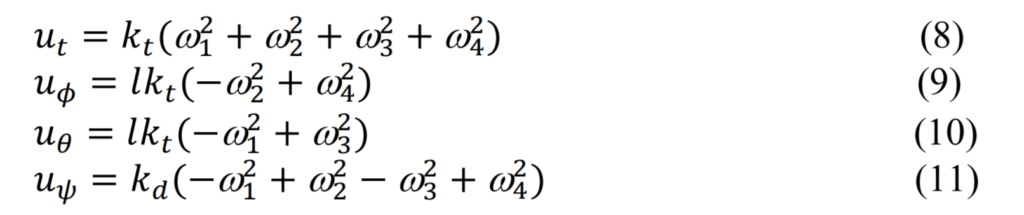
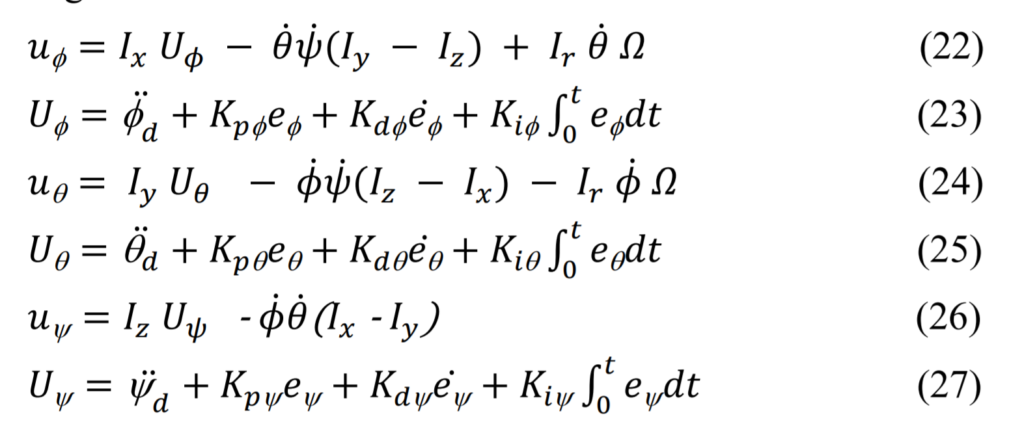
动力学公式
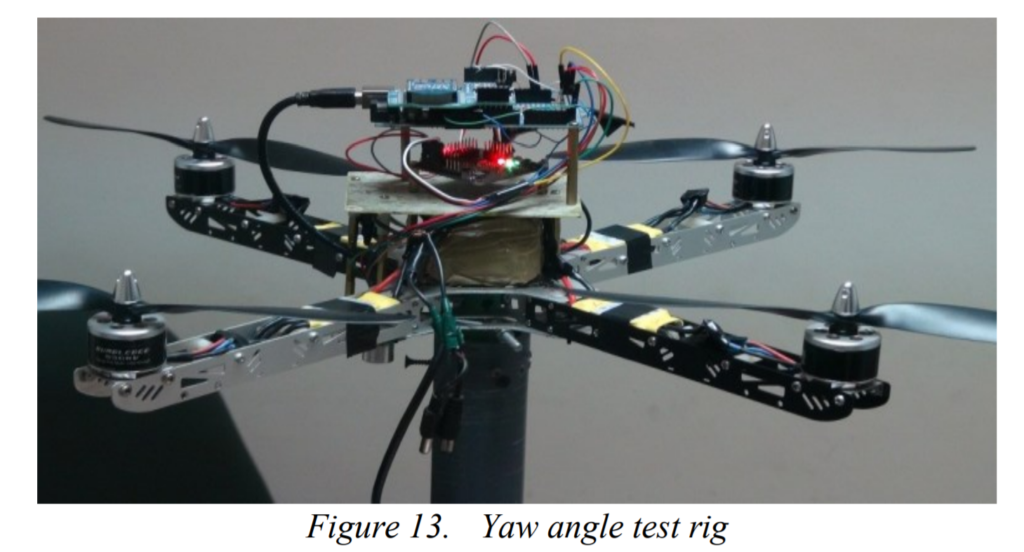
调试与调控
成果