

转载自 https://www.jianshu.com/p/397449cadc9a
前面大概提了一下在 network 中如何通过阻塞及同步异步还有多路复用来实现 I/O,现在终于可以讲到世纪linux中是如何使用API来实现I/O模型的. 这对比Operating书来说要实际和有意义.
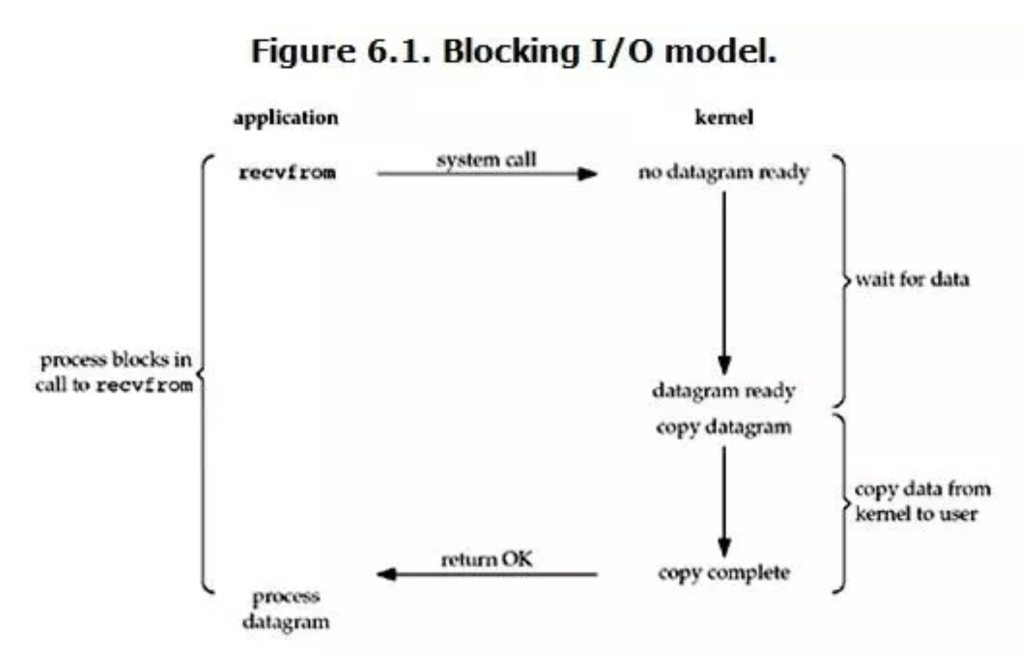
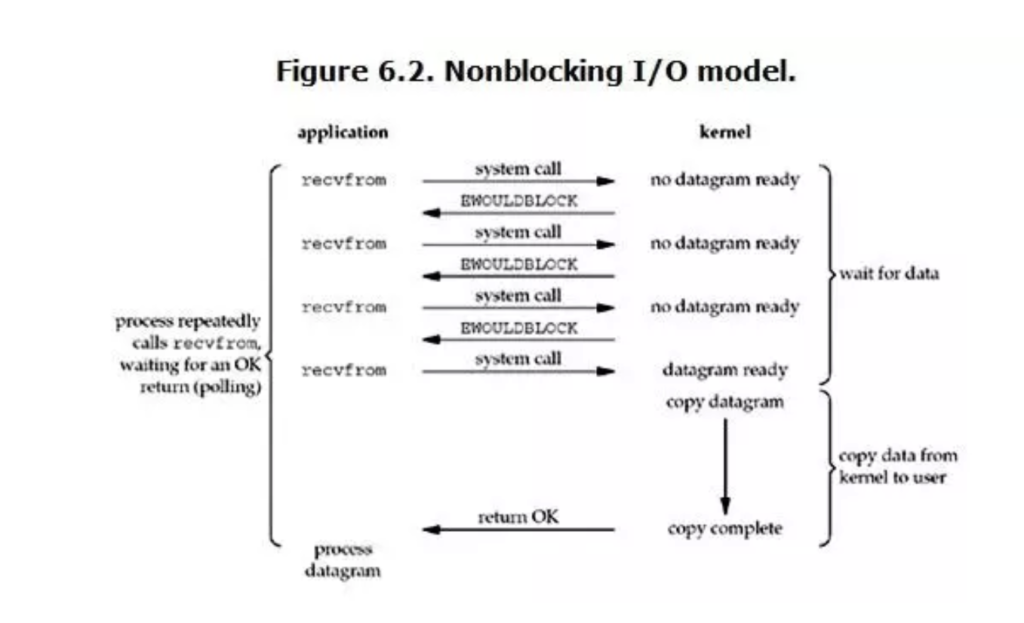
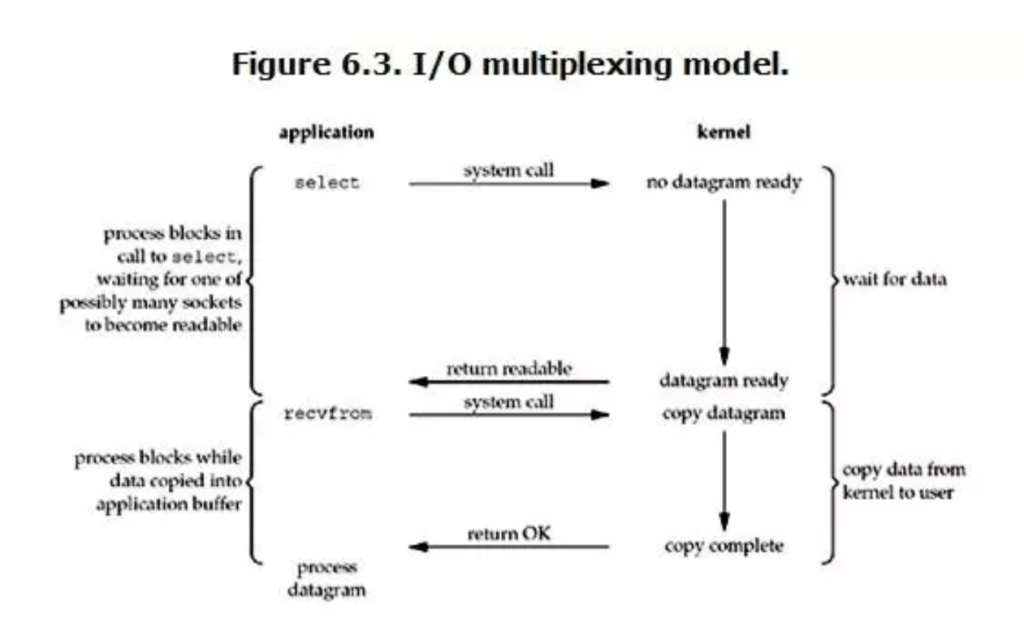
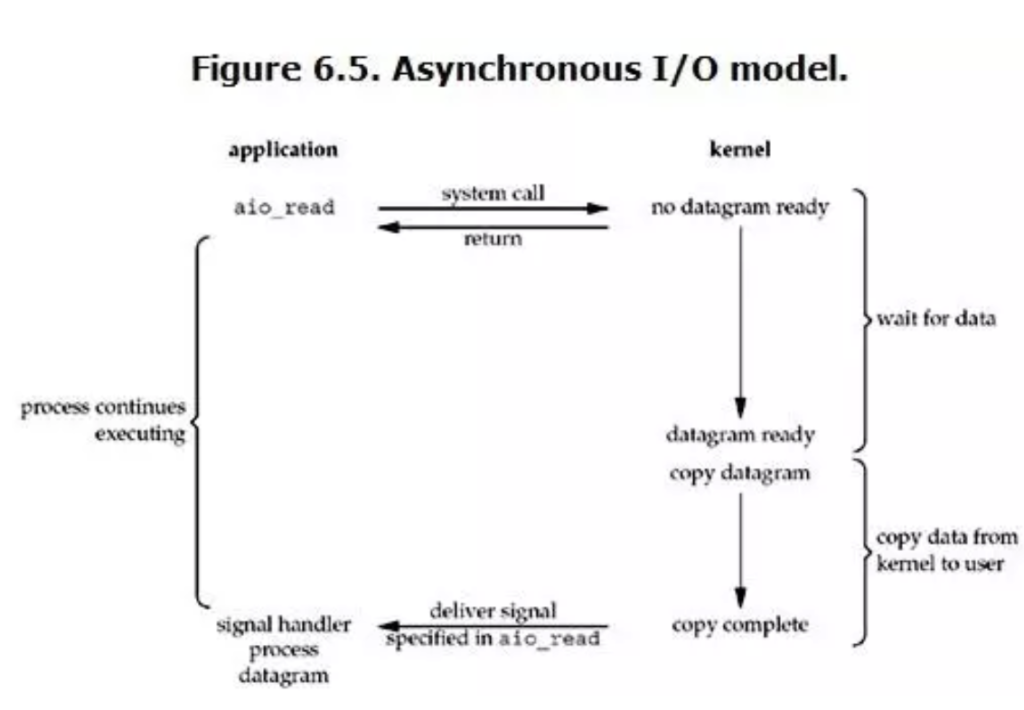
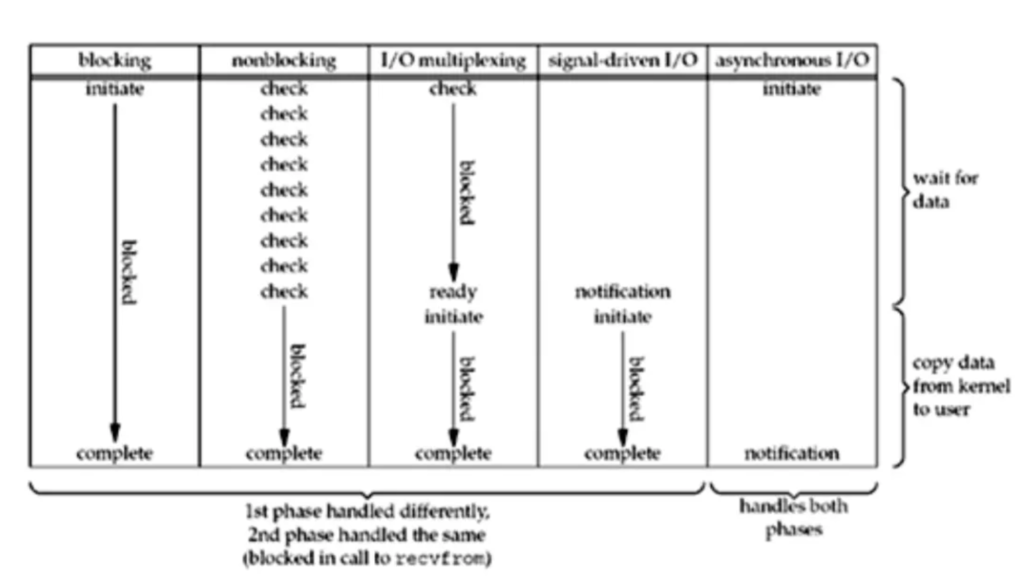
blocking IO - 阻塞IO & nonblocking IO - 非阻塞IO & IO multiplexing - IO多路复用 & signal driven IO - 信号驱动IO 都可以归类为synchronous IO - 同步IO,而select、poll、epoll本质上也都是同步I/O,因为他们都需要在读写事件就绪后自己负责进行读写,也就是说这个读写过程是阻塞的。
与多进程和多线程技术相比,I/O多路复用技术的最大优势是系统开销小,系统不必创建进程/线程,也不必维护这些进程/线程,从而大大减小了系统的开销。
在介绍select、poll、epoll之前,首先介绍一下Linux操作系统中基础的概念:
- 用户空间 / 内核空间
现在操作系统都是采用虚拟存储器,那么对32位操作系统而言,它的寻址空间(虚拟存储空间)为4G(2的32次方)。
操作系统的核心是内核,独立于普通的应用程序,可以访问受保护的内存空间,也有访问底层硬件设备的所有权限。为了保证用户进程不能直接操作内核(kernel),保证内核的安全,操作系统将虚拟空间划分为两部分,一部分为内核空间,一部分为用户空间。 - 进程切换
为了控制进程的执行,内核必须有能力挂起正在CPU上运行的进程,并恢复以前挂起的某个进程的执行。这种行为被称为进程切换。因此可以说,任何进程都是在操作系统内核的支持下运行的,是与内核紧密相关的,并且进程切换是非常耗费资源的。 - 进程阻塞
正在执行的进程,由于期待的某些事件未发生,如请求系统资源失败、等待某种操作的完成、新数据尚未到达或无新工作做等,则由系统自动执行阻塞原语(Block),使自己由运行状态变为阻塞状态。可见,进程的阻塞是进程自身的一种主动行为,也因此只有处于运行态的进程(获得了CPU资源),才可能将其转为阻塞状态。当进程进入阻塞状态,是不占用CPU资源的。 - 文件描述符
文件描述符(File descriptor)是计算机科学中的一个术语,是一个用于表述指向文件的引用的抽象化概念。
文件描述符在形式上是一个非负整数。实际上,它是一个索引值,指向内核为每一个进程所维护的该进程打开文件的记录表。当程序打开一个现有文件或者创建一个新文件时,内核向进程返回一个文件描述符。在程序设计中,一些涉及底层的程序编写往往会围绕着文件描述符展开。但是文件描述符这一概念往往只适用于UNIX、Linux这样的操作系统。 - 缓存I/O
缓存I/O又称为标准I/O,大多数文件系统的默认I/O操作都是缓存I/O。在Linux的缓存I/O机制中,操作系统会将I/O的数据缓存在文件系统的页缓存中,即数据会先被拷贝到操作系统内核的缓冲区中,然后才会从操作系统内核的缓冲区拷贝到应用程序的地址空间。
述符数量,返回0表示超时,返回-1表示出错;
Epoll
epoll在Linux2.6内核正式提出,是基于事件驱动的I/O方式,相对于select来说,epoll没有描述符个数限制,使用一个文件描述符管理多个描述符,将用户关心的文件描述符的事件存放到内核的一个事件表中,这样在用户空间和内核空间的copy只需一次。
Linux中提供的epoll相关函数如下:
int epoll_create(int size); int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event); int epoll_wait(int epfd, struct epoll_event * events, int maxevents, int timeout);
1. epoll_create 函数创建一个epoll句柄,参数size表明内核要监听的描述符数量。调用成功时返回一个epoll句柄描述符,失败时返回-1。
2. epoll_ctl 函数注册要监听的事件类型。四个参数解释如下:
epfd表示epoll句柄op表示fd操作类型,有如下3种- EPOLL_CTL_ADD 注册新的fd到epfd中
- EPOLL_CTL_MOD 修改已注册的fd的监听事件
- EPOLL_CTL_DEL 从epfd中删除一个fd
fd是要监听的描述符event表示要监听的事件
epoll_event 结构体定义如下:
struct epoll_event {
__uint32_t events; /* Epoll events */
epoll_data_t data; /* User data variable */
};
typedef union epoll_data {
void *ptr;
int fd;
__uint32_t u32;
__uint64_t u64;
} epoll_data_t;
3. epoll_wait 函数等待事件的就绪,成功时返回就绪的事件数目,调用失败时返回 -1,等待超时返回 0。
epfd是epoll句柄events表示从内核得到的就绪事件集合maxevents告诉内核events的大小timeout表示等待的超时事件
epoll是Linux内核为处理大批量文件描述符而作了改进的poll,是Linux下多路复用IO接口select/poll的增强版本,它能显著提高程序在大量并发连接中只有少量活跃的情况下的系统CPU利用率。原因就是获取事件的时候,它无须遍历整个被侦听的描述符集,只要遍历那些被内核IO事件异步唤醒而加入Ready队列的描述符集合就行了。
epoll除了提供select/poll那种IO事件的水平触发(Level Triggered)外,还提供了边缘触发(Edge Triggered),这就使得用户空间程序有可能缓存IO状态,减少epoll_wait/epoll_pwait的调用,提高应用程序效率。
- 水平触发(LT):默认工作模式,即当epoll_wait检测到某描述符事件就绪并通知应用程序时,应用程序可以不立即处理该事件;下次调用epoll_wait时,会再次通知此事件
- 边缘触发(ET): 当epoll_wait检测到某描述符事件就绪并通知应用程序时,应用程序必须立即处理该事件。如果不处理,下次调用epoll_wait时,不会再次通知此事件。(直到你做了某些操作导致该描述符变成未就绪状态了,也就是说边缘触发只在状态由未就绪变为就绪时只通知一次)。
LT和ET原本应该是用于脉冲信号的,可能用它来解释更加形象。Level和Edge指的就是触发点,Level为只要处于水平,那么就一直触发,而Edge则为上升沿和下降沿的时候触发。比如:0->1 就是Edge,1->1 就是Level。
ET模式很大程度上减少了epoll事件的触发次数,因此效率比LT模式下高。
总结
一张图总结一下select,poll,epoll的区别:
| select | poll | epoll | |
|---|---|---|---|
| 操作方式 | 遍历 | 遍历 | 回调 |
| 底层实现 | 数组 | 链表 | 哈希表 |
| IO效率 | 每次调用都进行线性遍历,时间复杂度为O(n) | 每次调用都进行线性遍历,时间复杂度为O(n) | 事件通知方式,每当fd就绪,系统注册的回调函数就会被调用,将就绪fd放到readyList里面,时间复杂度O(1) |
| 最大连接数 | 1024(x86)或2048(x64) | 无上限 | 无上限 |
| fd拷贝 | 每次调用select,都需要把fd集合从用户态拷贝到内核态 | 每次调用poll,都需要把fd集合从用户态拷贝到内核态 | 调用epoll_ctl时拷贝进内核并保存,之后每次epoll_wait不拷贝 |
epoll是Linux目前大规模网络并发程序开发的首选模型。在绝大多数情况下性能远超select和poll。目前流行的高性能web服务器Nginx正式依赖于epoll提供的高效网络套接字轮询服务。但是,在并发连接不高的情况下,多线程+阻塞I/O方式可能性能更好。
既然select,poll,epoll都是I/O多路复用的具体的实现,之所以现在同时存在,其实他们也是不同历史时期的产物
- select出现是1984年在BSD里面实现的
- 14年之后也就是1997年才实现了poll,其实拖那么久也不是效率问题, 而是那个时代的硬件实在太弱,一台服务器处理1千多个链接简直就是神一样的存在了,select很长段时间已经满足需求
- 2002, 大神 Davide Libenzi 实现了epoll
 罗雨威、叶者、曹松晖、张龙文、杨易为(从左往右)
罗雨威、叶者、曹松晖、张龙文、杨易为(从左往右)
